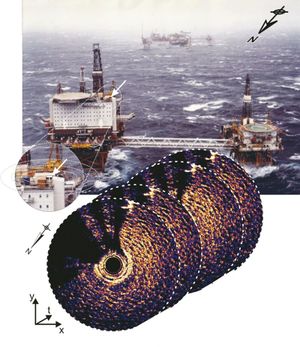
Figure 1: Ekofisk 2/4 k platform of the Ekofisk oil field in the North Sea. The WaMoS system is installed at the north-west corner of the platform. In the radar images several shadows are visible, which are due to the equipment of the platform. The large backscatter in the south originates from the oil field which is visible in the background of the photo.
Introduction
A marine radar has the capability of measuring the backscatter from the ocean surface in space and time independently of light and under most weather conditions (Fig. 1). The backscatter at the X=band frequency is strongly dependent on the surface roughness, which is induced by the local wind field and therefore enables us to measure the ocean wind with microwave radars. In contrast to most wind sensors radar retrieved winds are not affected by biases due to motion and height of the sensor. Since the wind is determined from the roughness of the ocean surface far beside the platform, the structure does not interfere with the measurement.
Methodology
WiRAR is a tool, which enables us to retrieve ocean surface winds from standard marine radars in real time (Dankert and Horstmann, 2007
[1] ).
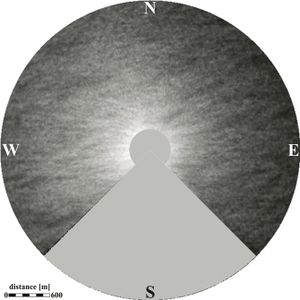
Figure 2: High-resolution RAR image of the ocean surface, acquired at grazing incidence with the X-band at horizontal (HH) polarization in transmission and reception. The image is the result of an average of 32 RAR images, which were sampled with a period of 60 s. Wind-induced streaks are clearly visible at scales below 500 m.
The wind direction retrieval in WiRAR is based on linear features, which are visible in radar data (Fig. 2). Most of these features are associated with wind streaks or streaks from foam or material floating on the surface at scales between 50 and 500 m. Orientation of these linear features are extracted by using the Local Gradient Method (Horstmann et al., 2002
[2]; Koch, 2004
[3]). In principle the gradient of the backscatter intensity of an image (grey-level) is computed from pixel to pixel. The direction of the strongest local gradient is perpendicular to the local wind direction. WiRARs wind speed retrieval utilizes the strong dependency of the normalized radar cross section (NRCS) on the local wind vector and the imaging geometry (Fig. 3). It is
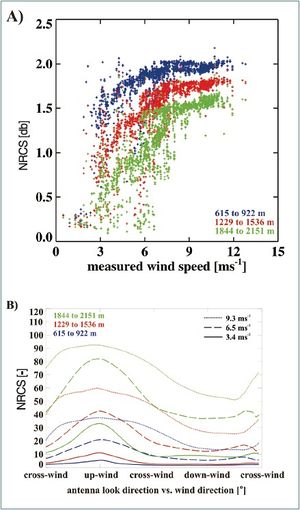
Figure 3: Dependence of the NRCS on a) wind speed and b) on wind direction with respect to the radar viewing direction.
described by a Geophysical Model Function (GMF), which is developed by the training of a Neural Network (NN). The only requirement for application of an NN to radar wind speed retrieval is the relative radiometric stability of the radar system. Unfortunately, marine radars are not calibrated, so that a NN has to be trained for each individual radar system.
Wind direction retrieval
In a first step a radar-image sequence is integrated over time, typically 32 images which represents 60 s of data (Fig. 1). By this integration the wind signatures are separated from other signatures. In particular patterns are removed, which are highly variable such as ocean surface waves. In the next step, the integrated radar image is sequentially smoothed and reduced to resolutions of 20, 40, and 80 m. From each of these images, local orientations are computed from the local intensity (i.e. grey level) gradients, which are normal to the local wind directions. Only the most frequent orientations in a predefined area are selected. However, it remains a 180° ambiguity. This can be removed either by determining the motion of wind patterns in radar-image sequences or by computing the cross-correlation function (CCF), which is used to estimate the shift of moving image patterns between two images.
Wind speed retrieval
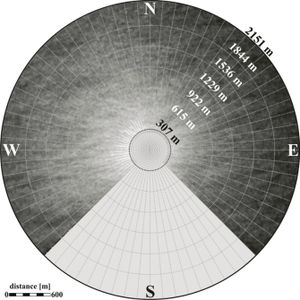
Figure 4: The image is the mean of a radar sequence. Each radar image was subdivided into bins, each of which has an azimuth of 5° and a range of 300 m as indicated by the superimposed grid. The masked areas were not considered in the investigation.
To describe the dependence of the wind speed on wind direction (determined from NRCS) and imaging geometry, a NN is utilized. Therefore, the mean NRCS image (image sequence integrated over time) is subdivided into subareas, with five intervals of 300 m in range, which start at a distance of 600 m and with sectors of 5° in azimuth. Reason for this subdivision is the radial gradient in radar backscatter: the intensity decreases from the centre to the border of the radar image, as visible in Fig. 4. For every subarea the mean NRCS is determined. A NN is trained which has the following parameters as input: (1) in situ measured wind speeds , (2) radar-measured wind direction, (3) the mean radar intensities in both crosswind directions, and (4) the antenna look direction. To improve the wind speed determination, the dependencies of the NRCS on additional parameters such as sea state and atmospheric stability can be considered in the training of the NN (Dankert and Horstmann 2007 [1]). Information on the sea state can be extracted from the radar datasets (Borge et al., 1999 [4]), while atmospheric stratification conditions, such as the air=sea temperature difference and the relative air humidity, need to be measured by external sensors.
Implementation

Figure 5: Research platform FINO-I with its ~101 m tall measurement mast. The marine radar is located below the helicopter deck. The radar-image sequences depicts a wave field pro- pagating in easterly *direction.
WiRAR was applied to the marine radar installed at the research platform FINO-I, which is located in the German Bight, North Sea, 45 km north of the island Borkum (Fig. 5). The radar aboard FINO-I is a commercial marine radarwhich operates at 9.5 GHz (X band) and observes the surface under a shallow grazing angle (Fig. 6).

Figure 6: Typical installation of an antenna of a X-band marine radar system.
The 2.4 m antenna rotates with a period of 2.5 s and has a spatial resolution of approximately 10 m at a distance of ~750 m. All data, used here, were acquired in the near-range mode, where the radar covers an area within a radius of ~ 2000 m. Each sequence consists of 32 images representing *80 s. The validation was performed on a data set collected over a period from August 2003 until November 2004, representing 4786 acquisitions. Fig. 5 shows the research platform FINO-I with its 100 m long mast. The radar antenna is mounted just below the helicopter deck at the northern part of the platform. The radar-image sequence depicts a wave field propagating in a southwesterly direction (Fig. 7).
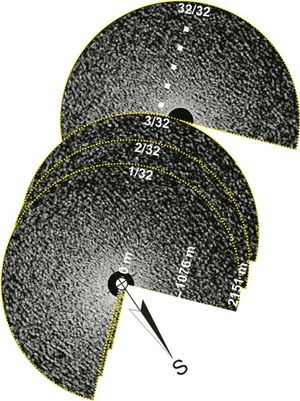
Figure 7: Radar image sequence as acquired by the radar. Obvious is a wave system, which travels from west to east.
The southern quadrant of the images contains radar shadows originating from the platform equipment, which have been masked (black sector) and which were excluded from the investigations. At FINO-I meteorological and oceanographic parameters are measured at various heights and depths.
Validation of wind directions
One example is given in Fig. 8. The resulting local mean directions are plotted as blue arrows. It can be seen that they agree well with the wind direction measured at the radar platform at a height of about 30 m (red arrows). For validation of the wind direction retrieval method of WIRAR, the radar-retrieved mean wind directions of 4786 image sequences are compared to the in situ measurements recorded at FINO-I at a height of 30 m.
The result is given in Fig. 9: the correlation coefficient of 0.99, the bias of 0.3°, and the standard deviation of 12.8°. Investigation of the dependence of the standard deviation on wind speed shows a significant decrease of the standard deviation with increasing wind speed, as the wind streaks become more pronounced.
Validation of wind speeds
A scatter plot of in situ wind speeds versus radar-retrieved wind speeds, which considers the NRCS as well as the radar retrieved wind direction, is given in Fig. 10.
 Figure 8: Mean RCS of an acquired radar-image sequence. The wind measured at the platform was 8 ms -1 with a wind direction of 335° (red arrows). Superimposed are the local wind vectors as retrieved from the radar (blue arrows). |
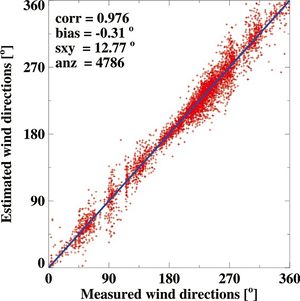 Figure 9: Scatter plot of in-situ wind directions versus radar estimated wind directions. |
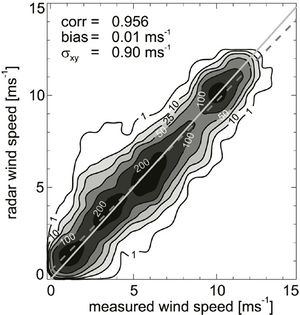 Figure 10: Comparison of in situ wind speeds versus wind speeds retrieved via WiRAR. The radar wind speeds were retrieved using the intensity of the mean radar image and the radar retrieved wind direction. |
Varying crosswind directions within ±15° of the true crosswind direction were used with the NN retrieved GMF. The result was a correlation coefficient of 0.96 with a bias of 0.01 ms
-1 and a standard deviation of 0.90 ms
-1 . The standard deviation was slightly decreased to 0.89 ms
-1, when only the true crosswind direction was considered. Therefore, an accuracy of ±15° for wind direction measurements is sufficient for accurate wind speed retrieval. To improve the given GMF for wind speed determination, the dependencies of the NRCS on additional parameters, such as sea state and atmospheric conditions, have to be considered. Information on the sea state can be extracted from the radar datasets, while atmospheric stratification conditions, such as the air-sea temperature difference and the relative air humidity, need to be measured by external sensors. In Fig. 11, in situ wind speeds are plotted together with the wind speeds, which come from the marine radar image for which the above listed parameters were used in addition. The correlation coefficient is 0.99, with a bias of 0.01 ms
-1 and a standard deviation of 0.41 ms
-1.
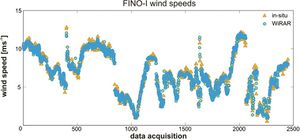
Figure 11: Times series of WiRAR and in situ wind speed measurements at FINO-I. WiRAR retrieved wind speeds consider the air-sea temperature differences as well as radar retrieved wave parameters.
Conclusion
The validation has shown that WiRAR is an ideal instrument tmeasure wind vectors with an accuracy of ~0.5 ms-1 in speed and ~13° in direction. In contrast to traditional offshore wind sensors, the retrieval of the wind vector from the NRCS of the ocean surface makes the system independent of the sensor’s motion and installation height as well as of the effects due to platform-induced turbulence. With the preexisting installations of radar systems on marine structures, harbours, platforms, and ships, the measurements can be acquired in a very cost-efficient way.
Related articles
- WiSAR - Wind retrieval from synthetic aperture radar
References
- ↑ 1.0 1.1 Dankert, H. & Horstmann, J. (2007). A Marine Radar Wind Sensor. Journal of Atmospheric and Oceanic Technology, 9 (9), 1629-1642.
- ↑ Horstmann, J., Koch, W., Lehner, S. & Tonboe, R. (2002).Ocean winds from RADARSAT-1 ScanSAR. Canadian Journal of Remote Sensing, 28 (3), 524-533.
- ↑ Koch, W., (2004). Directional analysis of SAR images aiming at wind direction. IEEE Transactions on Geoscience & Remote Sensing, 42 (4), 702-710.
- ↑ Borge, J.N., Reichert, K., & Dittmer, J. (1999). Use of nautical radar as a wave monitoring instrument. Coastal Engineering, 37 (3-4), 331-342.










